


第三回目ですが、みんな大好き青島文化教材社さんからネオゲッター1を作っていきます!
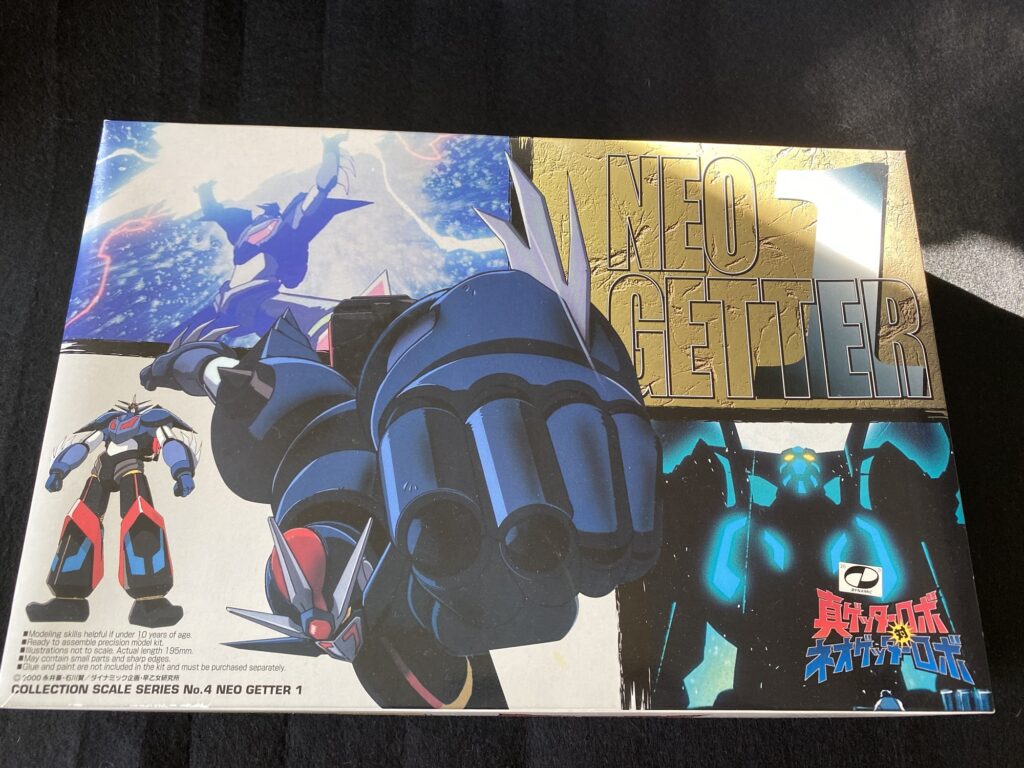
いいですね!この何処となく出ているレトロ感!唆ります。2001年のキットですが、もう20年以上経っているんですね。
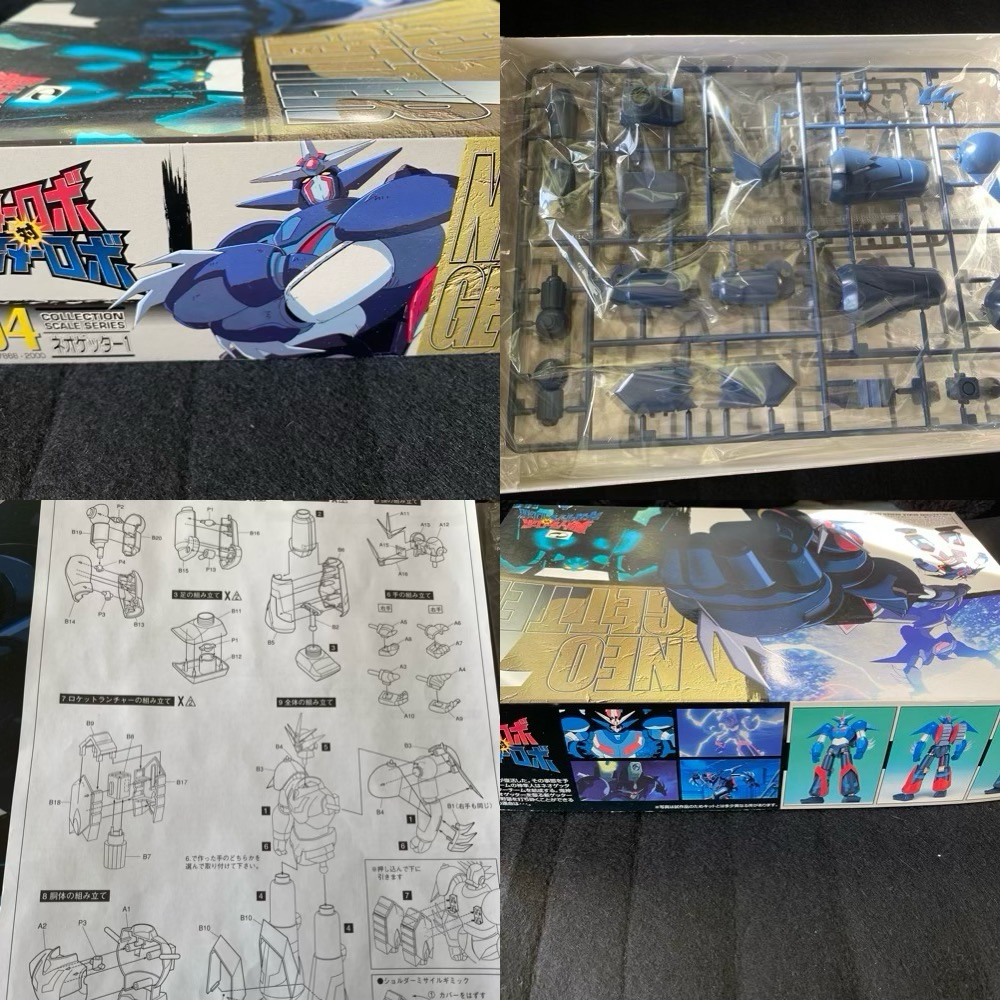
2001年といわれると、旧キットに分類していいのか微妙に感じます。説明書と箱を眺めているだけで、味わい深いです。では作っていきましょう。


で、とりあえず素組み完成です。プロポーションは悪くなく、とてもカッコいいです。可動も、首、肩、肘、手首、上腿、膝、足首とひととおりあります。今回はこの可動域を広げてしまおうという計画です。

まずは首部分。素組みだとここまでの可動が限界です。
そして、頭側にボールジョイントを刺したプラ板を仕込みます。首側には受けを接着します。関節技のボールジョイントを使っています。これで頭部はかなり自由に動くようになりました。

次に腕部分です。肩は役90度スイングし、ポリキャップ接続なのでこのままで充分でしょう。

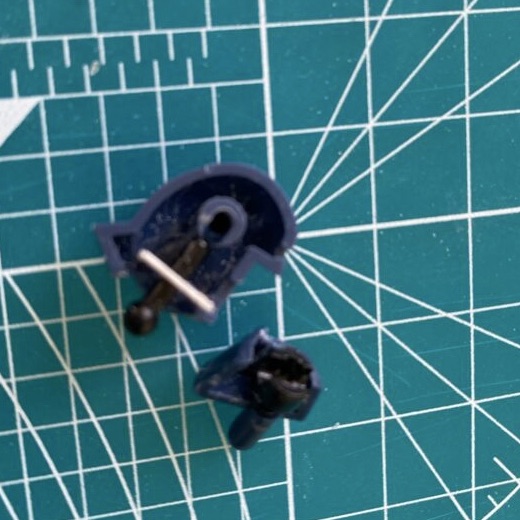
肘部分はボール状になっていますが、上腕と一体になっているので、ここはカットしてしまいます。

そしてここには、関節技の球体ジョイントを仕込みます。前腕部にはそのままピンを差し込めます。上腕部は余ったポリキャップの中から合うものを接着して、差し込めるようにします。反対側も同じ工作をして腕は完了ですね。

次は脚部です。膝関節はパーツ同士が干渉し、ここまでしか曲がりませんね。足首はボールジョイントですので、このままで大丈夫ですね。

太腿部分と関節パーツも一体化していますし、脛パーツ後ろのストッパーでこれ以上曲がらないようになっています。

なので、左側のように干渉する部分をカットします。

これで曲がる角度が広がりました!

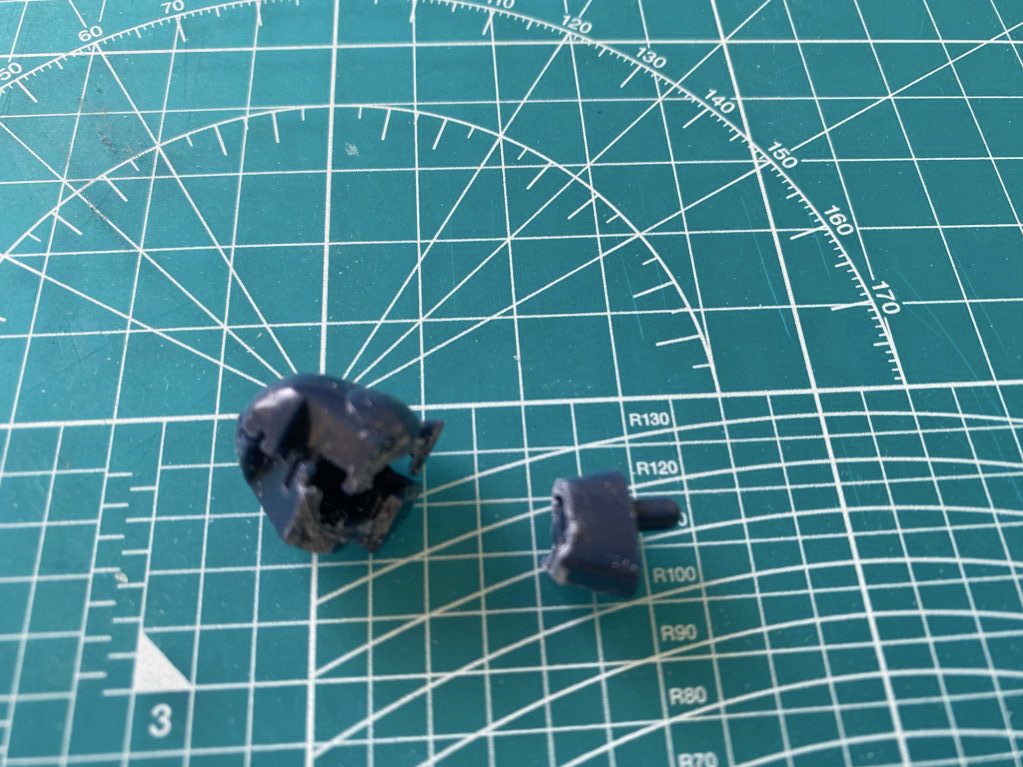
太もも部分と一体化している関節部を、雑にぶった切ります。

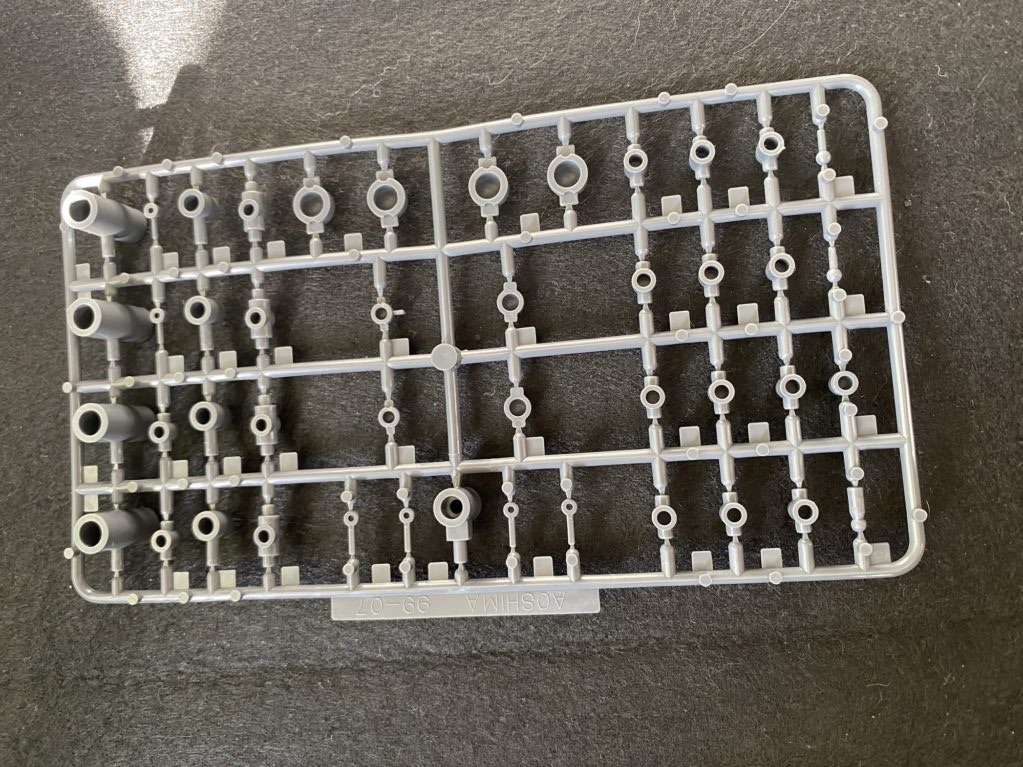
ランナーを軸にするので、それに合うポリキャップを太腿部分に仕込みます。ここは可動させたいので、ピンバイスで穴を開けたプラ板でポリキャップを挟み込みましょう。

関節パーツにランナー軸を埋め込みます。ついでに可動した時スカスカに見えないよう、エポパテで整形しておきます。パテが余ったので、雑にプラ板を固定しましょうか。

こんな感じで組み上がります。

で、こんな風に曲がります。

少し足が長くなってしまいましたが、短いよりはいいでしょう。
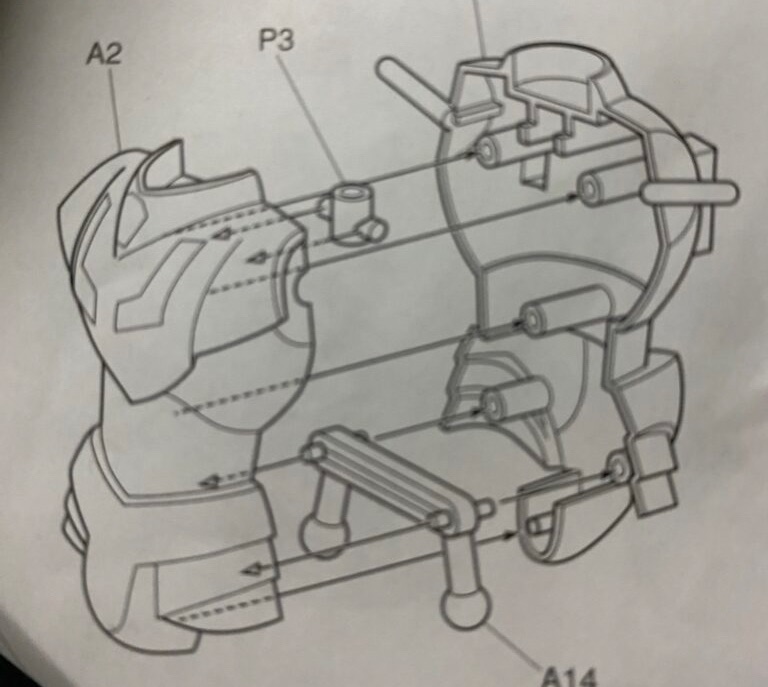
そして胴体です。写真を撮り忘れていたので、説明書からですみません!このようにボールジョイントで接続するようになっています。

ボールジョイントがついたピンを切りとります。そしてランナーとポリパーツで作った関節にピンを貼りつけます。そして胴体部分に接着します。これで脚部が前後にスイングするようになります。ではサクッと塗装していきます。今回塗装工程はカットです。

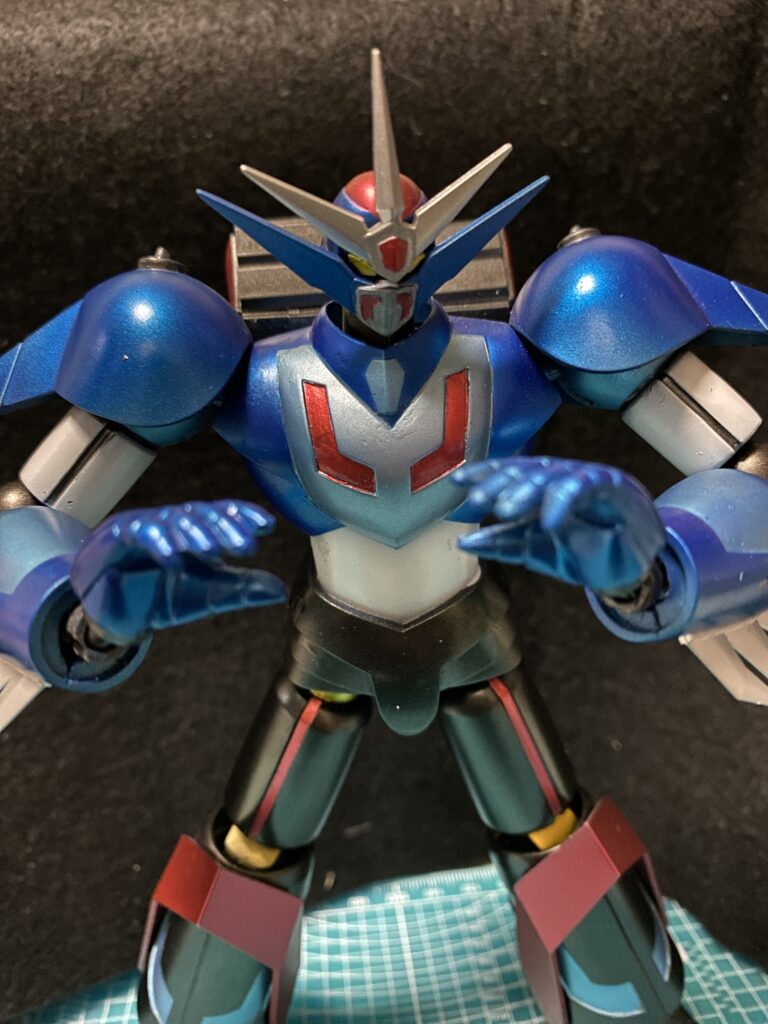
ということで完成です!スーパーロボットなのでやはりメタリックですよね!結局手首もボールジョイントを仕込みましたので、腕組みも一応できます。
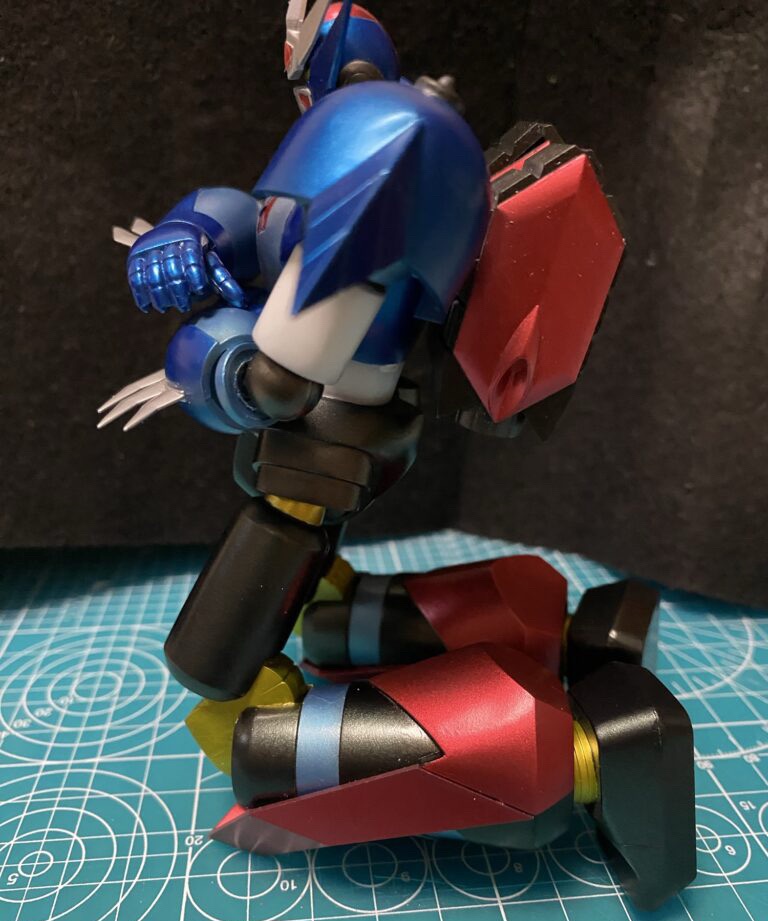
正座はできませんが、良く曲がります。

プラズマサンダー!雑に作ったエフェクト付き
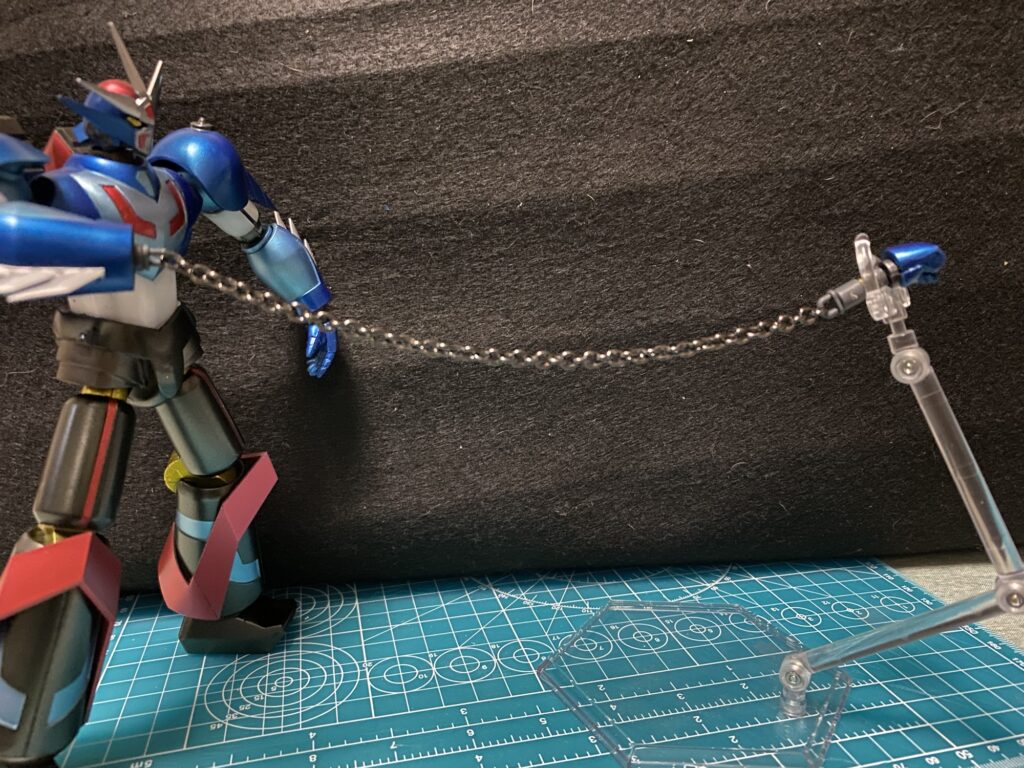
チェーンナックルごっこ

OPのパンチポーズ風。無理をして足がもげました。という事でアオシマさんのネオゲッター1でした!古いキットですがプロポーションも良好で、シンプルな構造ですが可動部も確保していて、改造もしやすい良キットです。結構いじる箇所が多く大変でしたが、楽しめたのでまたアオシマさんの別のシリーズも作りたいですね!では今回は以上です。